导读:多智能网联车辆协同控制作为智能交通系统的关键技术之一,因其在缓解交通拥堵、减少能源损耗等方面的巨大潜力,受到国内外专家学者的广泛关注。然而,现有研究多假定车辆于平坦路面行驶,忽略了实际场景中常见的起伏路段对车辆队列性能的影响,使得车辆在起伏不平的道路易出现跟驰振荡甚至引发交通事故。因此,如何在起伏路段这类复杂道路条件下实现高精度、快速收敛的协同控制,成为当前研究亟待解决的核心问题。基于此,团队提出基于可变车头时距策略和自适应机制的预设时间车辆协同控制策略,为多车辆系统在真实道路环境中的稳定运行提供新的技术路径。
一、理论创新
1)提出可变车头时距策略,以在突破对初始间距为零的不切实际的假设的同时,消除初始值引发的瞬态振荡并避免不必要的机械磨损。
2)设计无需先验道路信息的自适应增益机制,以在保证系统鲁棒性的同时,有效抑制滑模抖振并消除控制奇异性。
3)构建滑模控制器,保证纵横向间距误差在用户预先设定的时间内收敛到零;收敛时间上界仅由单一设计参数决定,与车辆初始状态和其它设计参数无关。
二、实验结果
实验证实,在起伏路段场景下,所提策略能在预设时间内实现纵横向间距误差的精确收敛。且与现有方法相比,本策略在收敛速度、稳态精度方面均表现出显著优势。
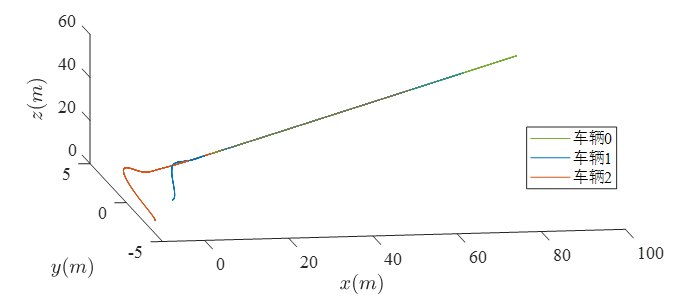
图1 多车道车辆合并轨迹
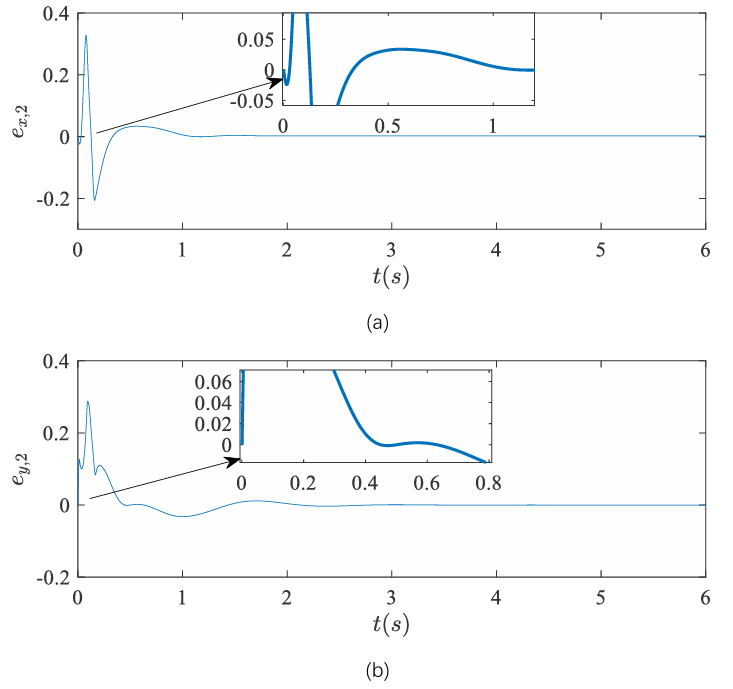
图2 车辆1的间距误差:(a) 纵向间距误差 (b) 横向间距误差
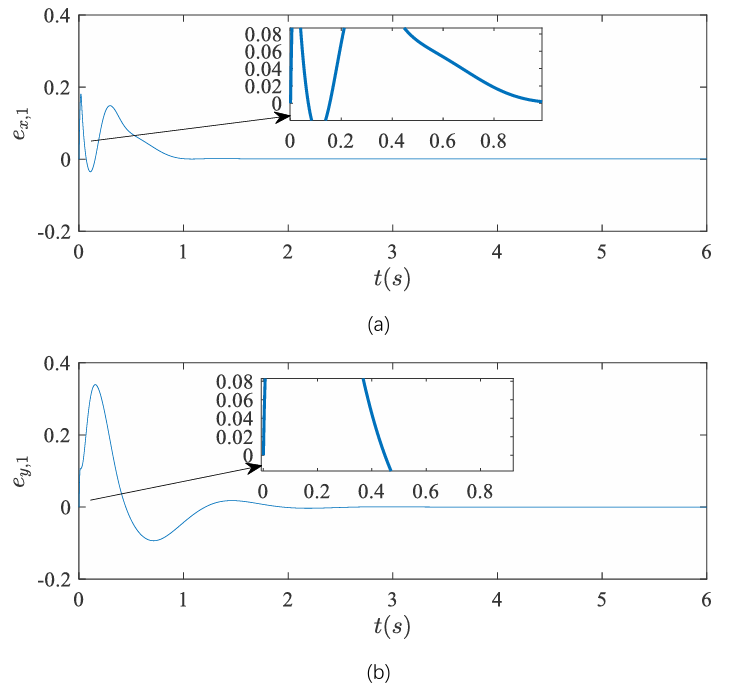
图3 车辆2的间距误差:(a) 纵向间距误差 (b) 横向间距误差
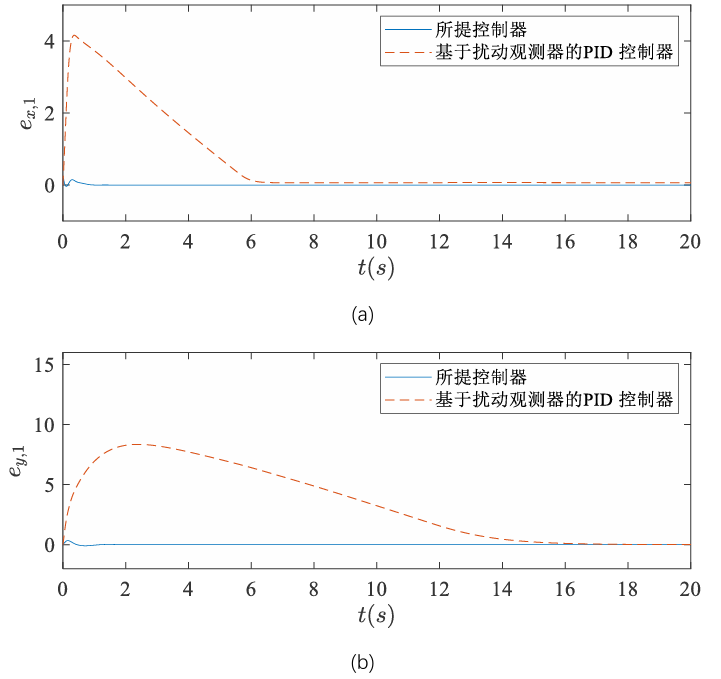
图4 所提控制器与基于扰动观测器的PID控制器的间距误差对比:(a) 纵向间距误差 (b) 横向间距误差
三、展望
该研究构建一面向复杂道路环境的纵横向车辆协同控制策略,实现了“初始误差消除—扰动补偿—预设时间收敛”的一体化设计,为多车辆系统在真实场景下的高可靠运行提供了理论支撑。未来将进一步结合通信时延、驱动饱和等工程约束,推动该策略向实际应用场景深入拓展。
论文信息:Q. Zhang, G. Guo, Y. -C. Wang and T. Sun, "Predefined-Time Cooperative Control of Vehicles on Multi-Lane Undulating Roads with Variable Headway," in IEEE Transactions on Vehicular Technology, doi: 10.1109/TVT.2026.3673317.



