导读:近年来,自动驾驶技术在轨迹规划和控制领域取得了显著进展,然而复杂的城市交通环境依然制约着车辆的性能表现,这要求我们在实际部署前进行充分的虚拟仿真与测试。目前研究面临的主要痛点在于,基于深度强化学习等数据驱动的方法虽然能够处理部分复杂场景,但往往面临着极高的计算复杂度和较差的可解释性瓶颈;同时,在真实的城市环境中极难获取高精度的车辆动力学模型,导致传统的纯反馈控制器在面对未知干扰时容易出现控制延迟,受限于车端有限的计算资源,自动驾驶系统很难实时处理庞大的环境数据和复杂的优化算法。针对这些短板,本研究团队提出了一种基于数字孪生(Digital Twin, DT)的自动驾驶轨迹规划与前馈-反馈控制架构;通过在虚拟空间中进行计算密集的路径规划与预测,并向物理空间输出前馈控制量,该方法不仅大幅降低了物理车辆的算力负担,还显著提升了复杂城市道路下的轨迹跟踪精度与抗干扰能力。基于数字孪生系统的车辆导航与虚实映射如图1所示。
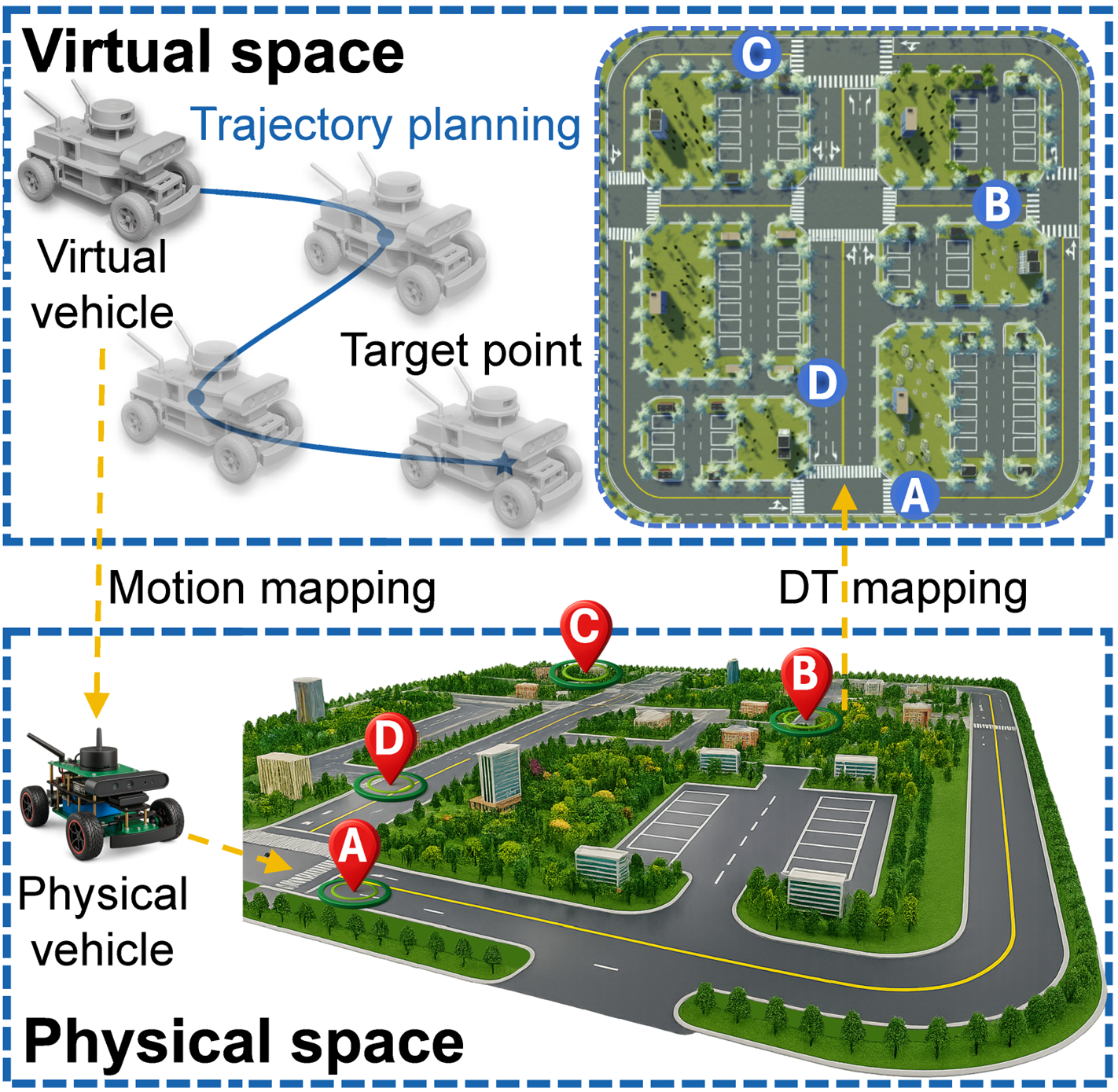
图1 基于数字孪生系统的车辆导航与虚实映射概念图
一、核心算法
本研究的核心在于通过虚实交互实现高效、高精度的车辆同步控制,主要包含以下三大创新点:
1.虚实交互的数字孪生系统架构
研究团队搭建了一个包含物理空间、虚拟空间、数据处理层和应用服务层的四层数字孪生架构,如图2所示。
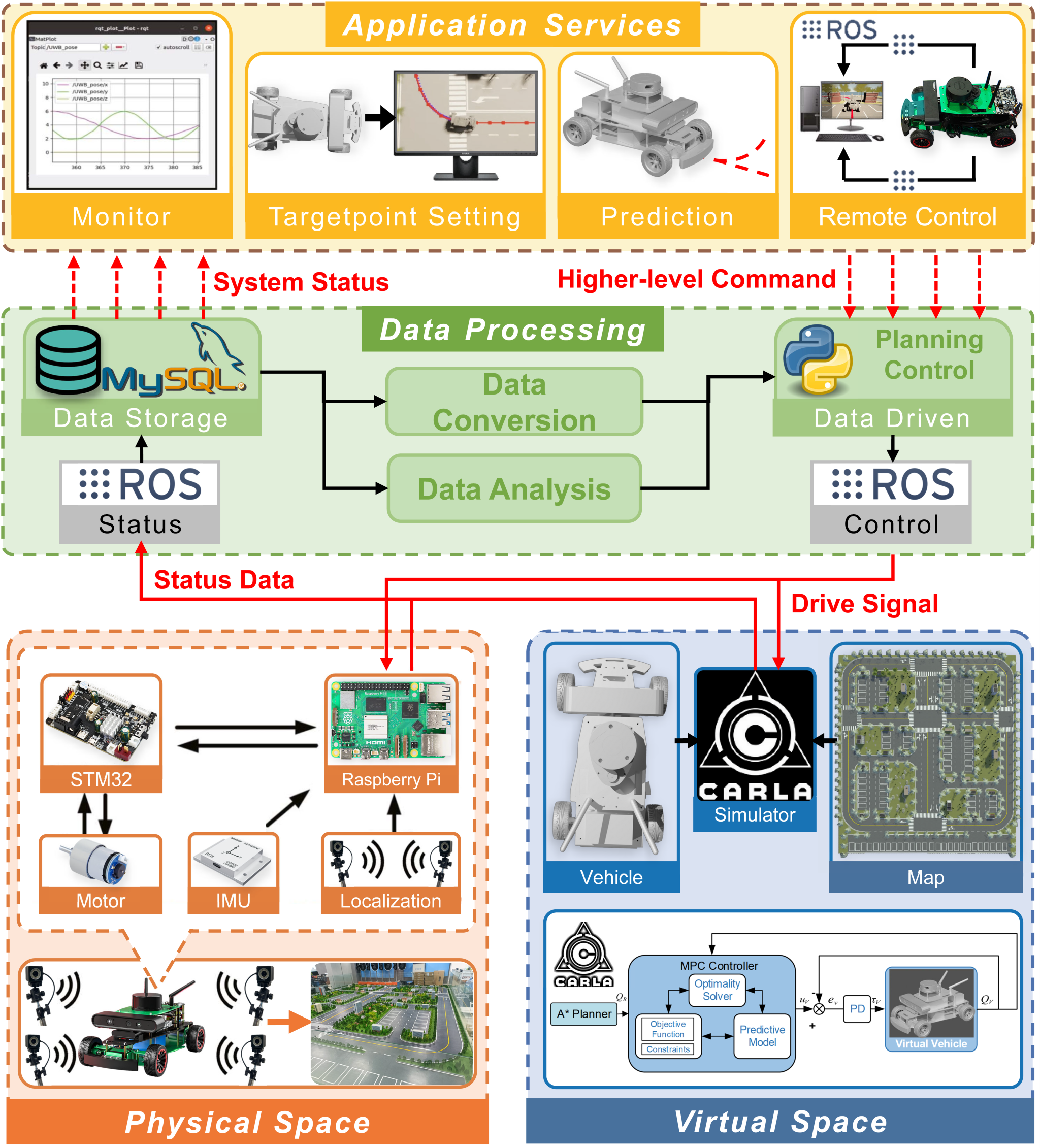
图2 数字孪生系统架构
虚拟空间基于CARLA仿真器和OpenDRIVE高精度地图构建,能够实现高保真度的动态场景仿真。物理空间则由真实的智能微缩交通沙盘和搭载底层控制器的物理车辆组成。两者通过ROS和无线网络进行实时的数据传输与状态同步。物理空间和虚拟空间如图3所示。
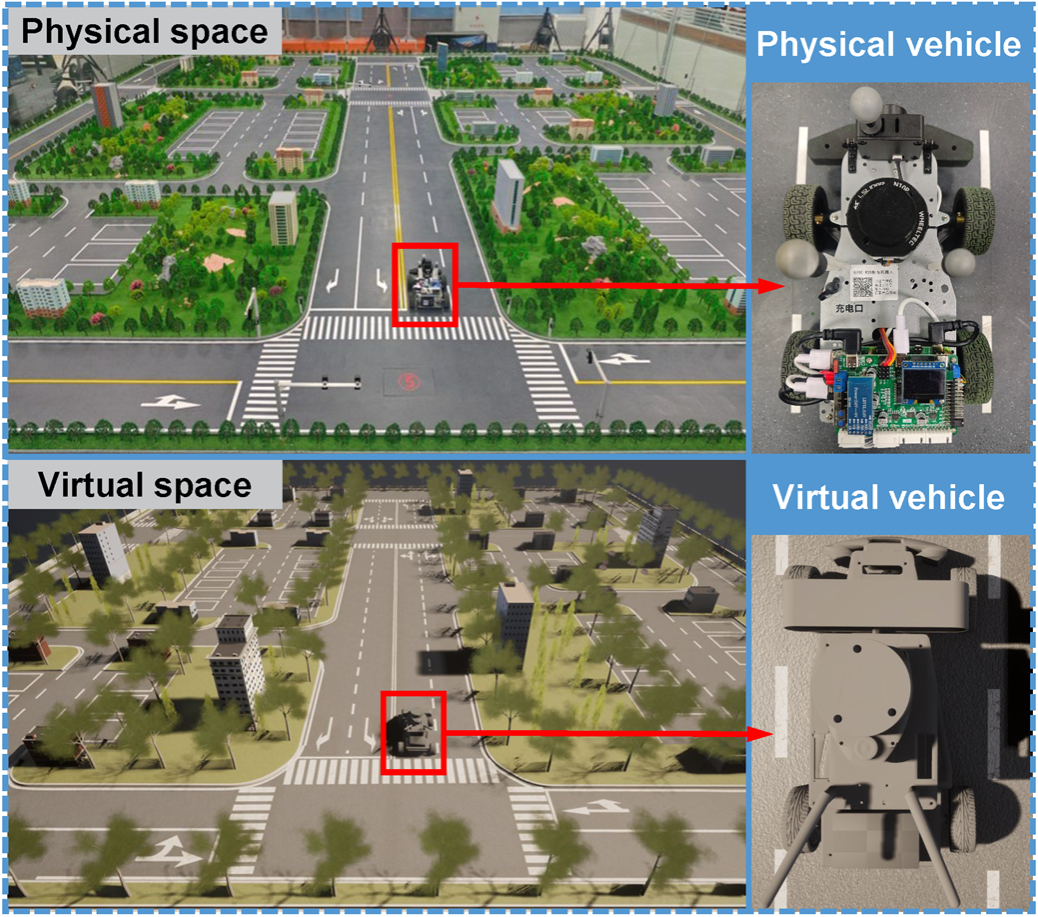
图3 物理空间与虚拟空间
2.虚拟空间:高精地图驱动的规划与模型预测
在虚拟空间中,研究人员改进了传统的A*算法,通过量化不同车辆行为(如直行、转弯、变道)的操作风险和距离,为路网边缘分配动态成本矩阵,从而在OpenDRIVE地图上快速生成兼顾几何路径与计算效率的全局最优路径。虚拟车辆利用模型预测控制(MPC)算法跟踪该全局路径,并在实时滚动优化中生成满足车辆运动学约束的参考轨迹以及前馈控制输入。车辆行为成本分配如图4所示。
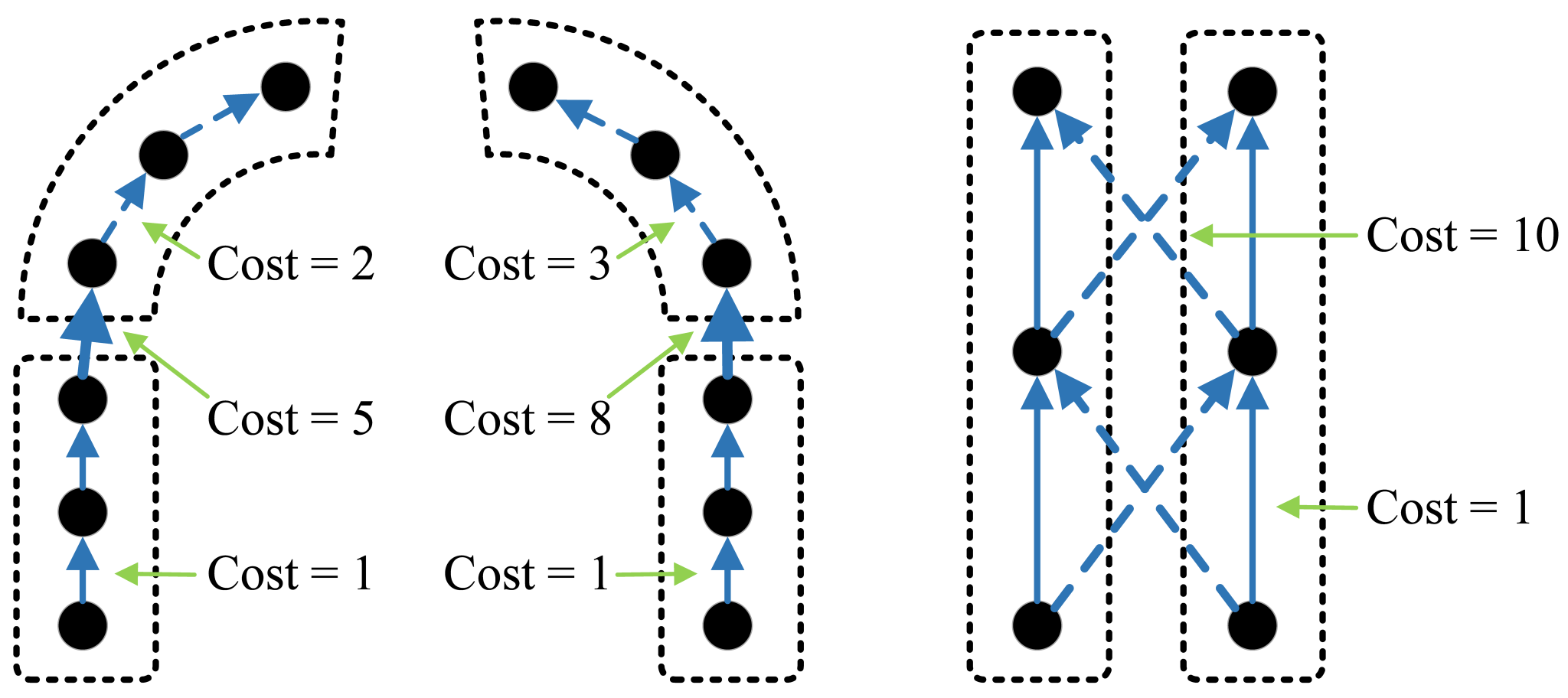
图4 车辆行为成本分配
3.物理空间:前馈-反馈与鲁棒抗扰控制
物理车辆无需进行复杂的MPC求解,而是直接接收来自虚拟车辆的参考轨迹和前馈控制输入,通过设计的反步控制器结合前馈信息,物理车辆能够精准跟踪虚拟车辆的目标位置,确保虚实同步。针对物理真实世界中存在的未知摩擦和侧滑等干扰,底层控制引入了非线性扩展状态观测器(ESO)和有限时间滑模控制器(SMC),利用ESO实时估计外部干扰,SMC则保障速度跟踪的快速响应和鲁棒性,控制策略框图如图5所示。
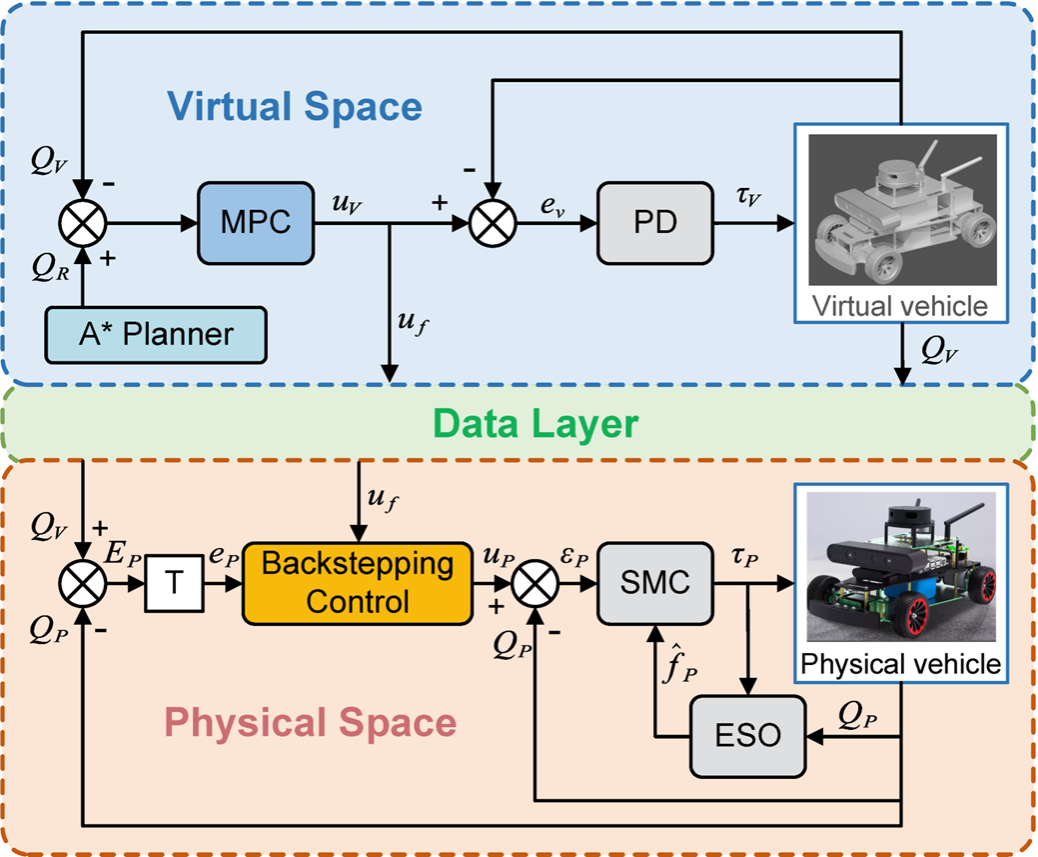
图5 前馈-反馈控制策略框图
二、实验验证
为了验证所提算法的有效性,研究团队在包含交叉路口、多车道和停车场的城市沙盘环境中进行了充分的实车测试。实车实验过程如图6所示。

图6 实车实验过程
此外,实验还将该数字孪生架构与现有的三种先进控制方法(DT-BES、DC-MPC、CW-MPC)进行了严格的对比测试。结果表明,所提方法的跟踪精度达到最优,其平均纵向误差、横向误差及航向角误差均达到最小;在稳定性方面,面对急转弯等曲率剧烈变化的路段,现有方法出现了明显的轨迹偏离,而本研究提出的方法始终保持着最小的误差波动和最集中的统计分布,展现出极高的跟踪稳定性和瞬态误差抑制能力。对比实验结果如图7所示。
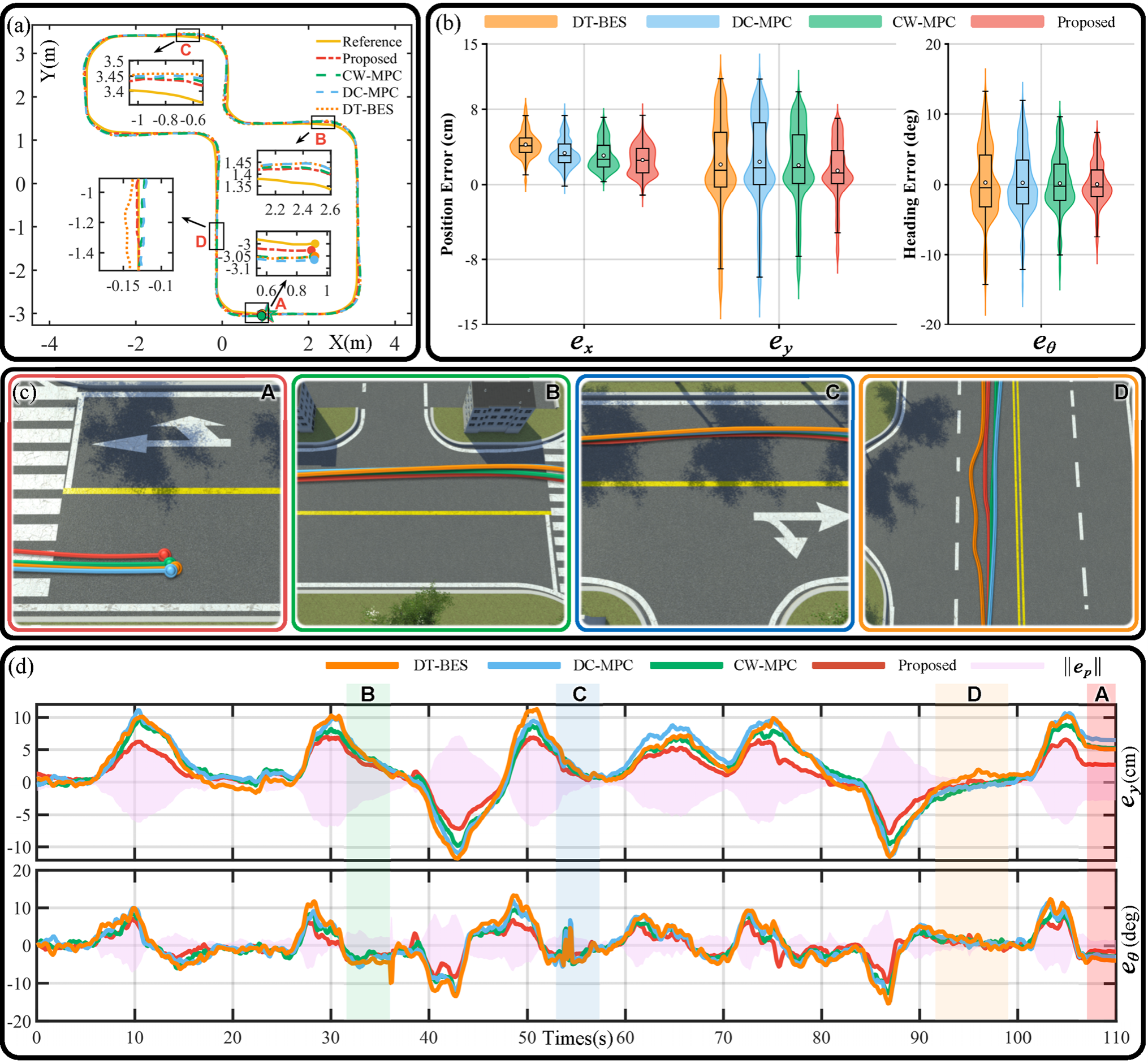
图7 对比实验结果。(a)所提方法、DT-BES、DC-MPC与CW-MPC相较于参考轨迹的轨迹跟踪性能对比。(b)整个测试过程中四种控制方法的跟踪误差小提琴图。(c)对应(a)中四个关键路段(A、B、C、D)的轨迹可视化。(d)四种控制方法的横向误差与航向角误差的时间序列对比
三、研究意义
本研究在自动驾驶控制系统设计方面具有重要的理论价值与工程意义。首先,通过数字孪生系统将计算最繁重的预测和优化任务转移到了虚拟空间,物理车辆仅需执行轻量级的前馈-反馈控制,这一机制突破了车端算力瓶颈,大幅降低了车载硬件需求与计算延迟;其次,与当前流行的深度强化学习方法相比,该框架直接融合了明确的车辆动力学与环境约束,避免了因“黑盒效应”带来的不可解释性难题,显著增强了系统在复杂城市场景下的可靠性;最后,虚拟空间“先验”生成的控制策略有效减少了物理测试中的试错过程,且该框架具备良好的尺度拓展性,仅需更新车辆和道路参数即可无缝迁移至全尺寸真实车辆上,极大降低了实验成本与操作风险,加速了相关技术的落地进程。
论文信息:
本研究由东北大学智能交通实验室与天津市智能无人集群技术与系统重点实验室合作完成。相关工作已被智能交通系统领域公认的国际权威期刊IEEE Transactions on Intelligent Transportation Systems正式录用发表。
Hongjiu Yang*, Meng Liu, Ge Guo and Chaoxu Mu. "Digital Twin-Based Trajectory Planning and Feedforward-Feedback Control for an Autonomous Vehicle on Urban Roads[J]. IEEE Transactions on Intelligent Transportation Systems, 2026, doi: 10.1109/TITS.2026.3659130.



