导读:智能网联车辆(CAV)协同控制是车路协同技术体系中的核心环节之一。CAV要实现稳定的车间距离保持与速度跟踪,离不开基于LTE-V2V通信网络共享的协同感知消息(CAM)。CAM信息的交互频率,通常由信标速率(Beacon Rate)来衡量——从每秒1次到10次不等,速率越高,信息更新越频繁,控制精度和实时性也越好,但与此同时,占用的通信资源也越多。然而,LTE-V2V网络的通信资源是有限的。当道路上行驶着大量高速移动的CAV时,通信资源的时空分布不均问题尤为突出。如果为所有CAV分配固定的信标速率,很容易引发通信冲突,降低信息传输的可靠性,进而影响车辆协同控制的性能,甚至可能引发系统失稳,带来安全隐患。针对这一挑战,本团队提出了一种“车联网环境下CAV协同控制与信标速率分配的协同优化设计框架”。该框架创新性地将CAV的跟踪控制与信标速率的自适应分配进行协同设计,根据实时控制误差动态调整通信频率,实现“按需通信、精准控制”。这一方法有效解决了CAV分布式控制对CAM信息的高需求与LTE-V2V通信资源供给不足之间的矛盾,显著提升了复杂道路场景下CAV协同控制的实时性与鲁棒性,为实现高可靠、高效率的车路协同提供了新的技术路径。
一、理论创新
1.提出一种基于启发式算法的CAM信标速率自适应分配方案。该方案能够根据LTE-V2V网络的通信资源动态变化以及CAV的跟随误差,实时调整信标速率,不仅保证了CAV协同控制的队列稳定性,还有效缓解了车间通信干扰与冲突。
2.通过引入对数障碍函数,将带约束的协同优化问题转化为无约束优化问题,实现了CAV控制优化与CAM信标速率分配的协同设计。该框架能够同时应对有限车间通信资源、切换通信拓扑以及CAV控制输入受限等多重约束。
3.揭示了CAM信标速率、车间通信可靠性与CAV跟踪控制性能之间的相互影响机制,并量化了LTE-V2V通信网络中CAV协同控制性能与车间通信资源利用效率之间的基本权衡关系。
二、实验结果
通过Matlab仿真实验,本文在车间通信资源受限条件下验证了所提的自适应信标速率分配与CAV协同控制框架的有效性。仿真结果表明,与传统固定信标速率算法LIMERIC相比,所提策略不仅具备更高的灵活性,还通过与CAV跟踪控制的协同设计,在跟踪误差收敛速率和控制精度方面展现出显著优势。
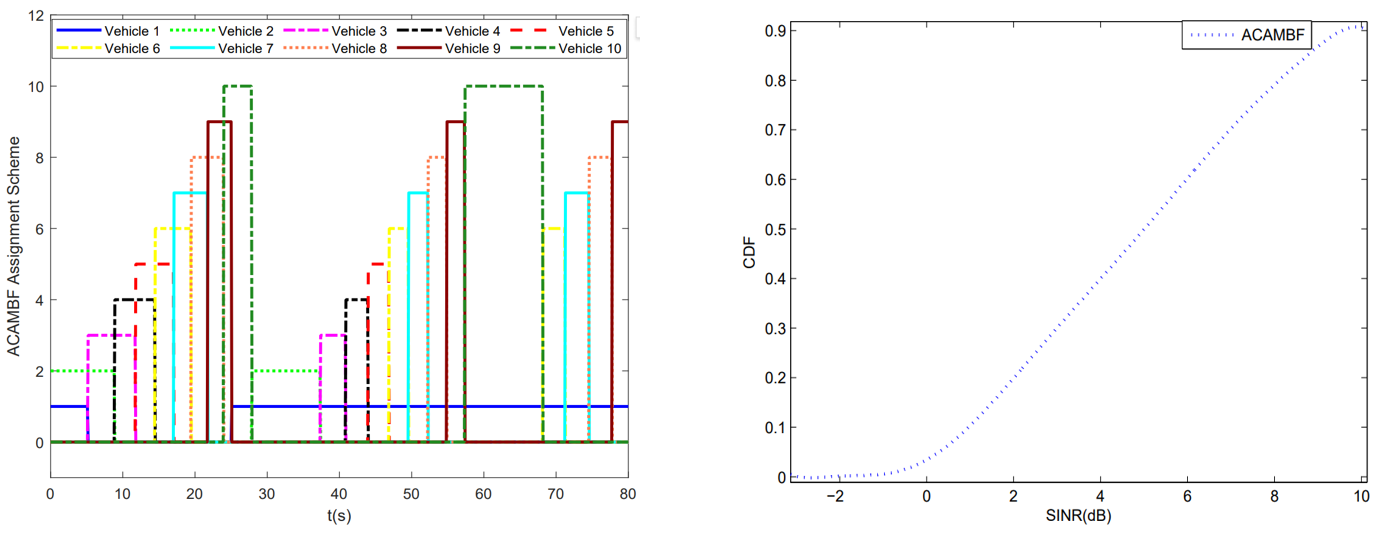
从上图可知,每辆CAV车辆的信标速率,实现了在最大通信标速率(10Hz)与最小信标速率(1Hz)之间的自动分配,以此克服通信资源约束。图中,y轴的纵坐标值‘0’表示1Hz;‘1-10’表示分配10Hz的CAV车辆在队列中的编号。其中,有限的通信资源,使得队列中的只有2辆CAV能够同时以最大通信标速率(10Hz)传送CAMs信息。实验中预设的信干噪比SINR(Signal to Interference plus Noise Ratio)的阈值为-0.21dB 。由V2V通信信道中SINR的平均值对应的CDF (cumulative distribution function )可知,所提的自适应信标速率分配策略可保证V2V通信是可靠的。

三、应用与展望
该研究为复杂动态车联网环境下的CAV通信与控制协同设计,提供了一个兼具实时性、鲁棒性与精准性的创新理论框架。该框架通过引入跟踪误差反馈机制,将自适应信标速率分配与CAV跟踪优化控制有机结合,从根源上解决了有限通信资源下基于CAM信息的CAV分布式控制难题。相较于传统固定信标速率方案,所提方法有效消除了因通信资源受限引发的车间通信冲突与干扰,保障了CAV协同控制的稳定性和可靠性,使系统能够在时变通信环境中实现快速、精确的协同跟踪控制。本成果不仅为通信资源受限场景下的车路协同运行提供了关键技术支撑,也为高可靠、大规模车联网协同控制系统的工程化落地奠定了坚实的理论基础,对推动智慧交通系统的实际应用具有重要的学术价值与现实意义。本研究由我实验室郭戈教授团队与大连大学文世喜副教授合作完成。
论文信息:Shixi Wen, Ge Guo*, Yuan Zhao, and Zhenyu Gao. Adaptive Cooperative Awareness Messages Broadcast Frequency Assignment and Optimal Control Co-Design for Connected Vehicles in LTE-V2V Communication Network. Accepted for publication in the IEEE Transactions on Intelligent Transportation Systems.



