导读:在智能网联汽车与智慧交通系统快速发展的当下,自动泊车是自动驾驶领域的核心应用场景之一,而停车场、工业场地等狭窄环境因障碍物杂乱、可行驶空间狭小,使得自动泊车系统的高效轨迹规划面临巨大挑战。现有规划算法存在明显短板:几何法易出现曲率突变,采样法(如传统混合A*)路径冗余、规划耗时,数值优化法计算复杂,机器学习法依赖大量训练数据。其中主流的混合A*算法在狭窄环境中易产生保守路径,需多次反复调整;而目标树法则存在曲率不连续问题,二者单独使用均无法满足高效、精准的泊车需求。因此,亟需设计新型融合算法突破技术瓶颈。
近日,针对狭窄环境下自动泊车系统轨迹规划面临的空间受限、路径冗余、规划耗时等难题,本研究团队提出一种基于增强目标树与改进混合A*算法的集成路径规划方法,通过仿真与实车实验验证,该算法可在狭窄环境中快速生成连续曲率的最短泊车路径,泊车成功率达100%,规划效率与路径质量显著优于传统算法,为复杂场景下的自动泊车技术提供了新的解决方案。
一、核心算法
1 改进混合A*算法:为节点代价函数引入前进运动、速度方向变化、前轮转向变化、航向变化四项惩罚项,减少不必要的倒车、转向操作,降低路径冗余;在启发函数中加入调节系数,平衡路径质量与规划速度,避免算法过度探索。
2 增强目标树算法:采用三次抛物线法在原目标树的直线与圆弧连接点插入抛物线路径,彻底解决曲率不连续问题,减少轮胎磨损、提升泊车稳定性;将单一泊车目标点扩展为数百个离散位姿点,扩大混合A*的搜索域,大幅缩短规划时间。
3 集成算法架构:设计采样匹配与最优节点筛选机制,混合A*从目标树中采样可行位姿点,通过最短操作时间算法筛选最优节点,将混合A*生成的走廊路径与目标树的泊车路径拼接,形成“连续曲率、无冗余、避障可行”的完整泊车轨迹,兼顾规划效率与路径平滑性。
二、实验验证
1. 不规则场景仿真实验:在不同狭窄程度的不规则场景中,改进混合A*相比原混合A*路径长度降低22.9%-30.4%,规划时间降低38.3%-45.6%,航向变化次数减少35.1%-52.0%;集成算法在所有仿真场景中泊车成功率稳定100%,相比EHA*-NO、H-OBCA等传统方法规划时间最高缩短74.6%,路径长度更短且无曲率突变
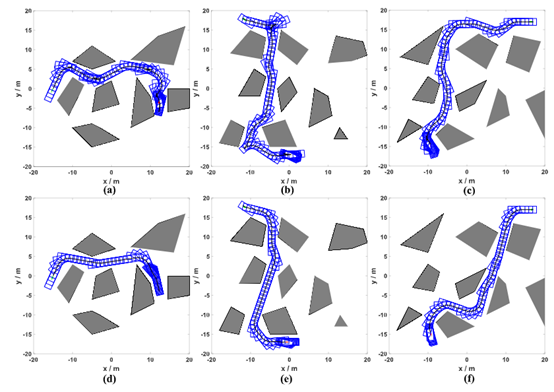
图1. 改进原始混合A*算法在三种场景下的路径规划对比结果;(a)–(c):原始混合A*算法。(d)–(f):改进型混合A*算法;(a)、(d):环境窄度η=2.3;(b)、(e):环境窄度η=1.9;(c)、(f):环境窄度η=1.6
2. 标准停车场仿真实验:在不同车位狭窄程度的受限场景中,该算法规划时间较传统算法至少降低20.8%,路径长度至少优化3.4%,在最窄场景中成功率较原混合A*提升17%,展现出强大的环境适应性。
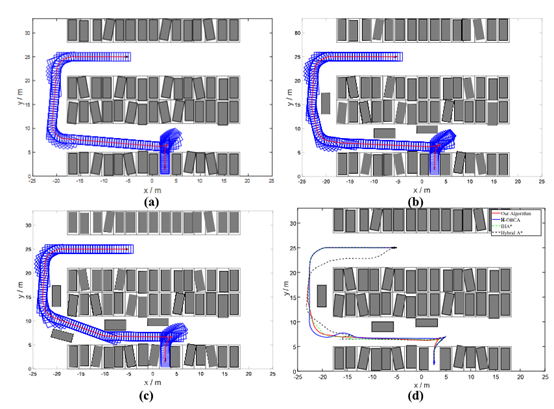
图2. 标准停车场场景下路径规划的实验结果;(a) 场景1:(x=(2.33,0.67));(b) 场景2:(x=(0.61,0.33));(c) 场景3:(x=(0.61,0.11));(d) 与基线方法的对比结果(以场景2为例)
3. 实车实验:在7.2m×4.8m的户外狭窄环境中,基于百度Apollo实验车的测试结果显示,算法规划的参考路径与实际跟踪路径高度贴合,无碰撞、无明显轨迹偏差,验证了方法的工程实用性。

图3. Apollo实验车辆的配置和实验场地
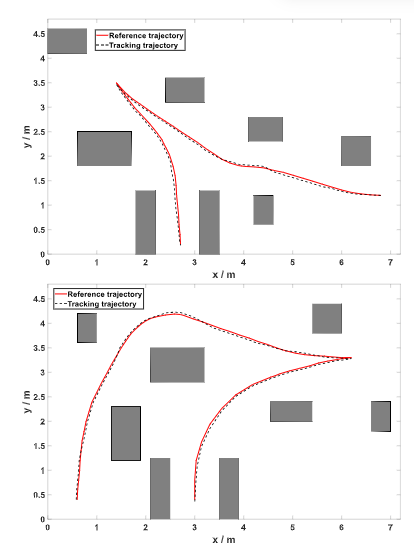
图4. 基于百度Apollo实验车的路径验证实验结果
三、研究意义与实用价值
本研究的意义在于针对狭窄、非结构化环境(如拥挤的停车场、不规则工业场地)提供了一种能够在有限空间中快速生成平滑、无碰撞轨迹的新方法。所提出的集成轨迹规划框架通过将增强目标树与改进混合A*相结合,在保证路径可行性的同时,显著提升了路径的平滑性和规划效率,为复杂环境下的路径规划提供了新的思路。该算法不仅适用于不规则障碍物环境,也可扩展至标准化停车场场景,具备较强的通用性和可迁移性,未来可集成至量产车的智能驾驶系统中,为自动泊车功能提供高效、可靠的决策支持,具有重要的学术价值与广泛的应用前景。
论文信息:本研究由东北大学智能交通实验室完成。相关工作已被智能交通系统领域公认的国际权威期刊之一《IEEE Transactions on Intelligent Transportation Systems》正式录用发表。
Zhengsong Wang, Ping Yang, Ge Guo*, Yongtao Wei, and Meng Han. Trajectory Planning in Narrow Environments by Integrating Enhanced Target-Tree and Hybrid A* for Automated Parking Systems[J]. IEEE Transactions on Intelligent Transportation Systems, 2026, 27(3): 3309-3324. DOI: 10.1109/TITS.2025.3642158



