导读:在当今的智能交通时代,自动驾驶技术正以前所未有的速度改变着人类的出行方式。从城市道路的自动驾驶出行到复杂环境下的无人系统自主运行,其背后都离不开一个核心问题——在城市峡谷、遮挡与多路径等典型退化场景中,如何在 GNSS 观测不稳定、甚至出现异常的情况下,仍获得连续、精确且可信的车辆定位结果。定位是自动驾驶感知、规划与控制的“基座”,一旦定位突跳或漂移,轨迹偏差会迅速放大并传导到决策与控制,带来安全风险。然而,现实交通环境充满不确定性。建筑遮挡、树荫覆盖、隧道/下穿以及电磁干扰会导致 GNSS 测量出现突跳、漂移、延迟或局部维度异常。这类异常往往并非完全中断,而是以隐蔽方式持续存在,使传统 GNSS/IMU 融合滤波在更新时容易被错误观测“污染”,进而产生不稳定甚至发散,可靠性与实时性难以兼顾。近日,本研究团队提出了一种面向 GNSS 观测异常的容错定位框架(ESKF–Residual-DIA)。该框架在误差状态卡尔曼滤波(ESKF)稳定传播基础上,引入残差驱动的检测–识别–自适应(DIA)机制:通过残差统计与动态阈值实现异常感知与触发,再进一步识别异常来源的观测维度,生成候选观测子集并择优完成稳健更新,从而在不依赖复杂异常先验模型的前提下,最大限度保留有效信息、抑制异常传播,维持位置、速度与航向估计的连续性与稳定性。该成果为复杂城市环境与 GNSS 退化条件下的自动驾驶高可靠定位提供了新的理论支撑与工程路径,可在异常路段有效降低误差与轨迹突跳概率,并保持可满足实时运行的计算开销,为安全关键定位系统的落地部署奠定基础。
一、理论创新
1. 残差驱动的维度级异常建模与剔除:本研究在ESKF更新中引入检测–识别–自适应(DIA),构建维度异常剔除机制,并采用残差驱动检测机制建模与消除维度级GNSS测量异常。该机制与ESKF无缝集成且不改变结构,在给定显著性水平下判别异常残差,使异常观测在更新前被排除并抑制传播。
2. 本研究团队提出维度自适应动态阈值策略,将每个观测维度的残差统计特征与系统不确定性水平相结合。具体而言,通过滑动窗口实时估计残差的均值与标准差,并引入协方差感知阈值,利用不确定性指标与缩放因子动态调整拒绝边界。该机制使检测阈值随工况与协方差变化自动更新,在GNSS退化或不一致观测下仍保持稳定触发与有效筛除,降低固定阈值带来的误警与漏检。
3. 为应对异常维度随时间变化且难以预先确定的问题,论文设计了一个观测子集的自适应选择机制。系统在异常触发后构建候选观测子集,限制最多排除29个维度,从而形成29个候选方案,并利用白化残差与复合代价函数对各子集进行统一评估,自动选择最优子集完成更新。该机制使滤波器在存在局部异常时仍能最大限度保留有效信息并抑制异常传播,显著提升复杂退化场景下的稳定性与鲁棒性。
二、仿真模拟
在异常注入仿真与公开实车数据两类验证中,结果表明本文方法在GNSS观测突跳、漂移与延迟等退化片段能够保持稳定更新,显著降低定位误差并抑制轨迹突跳,同时维持可满足实时运行的计算开销。

从上图可以看出在真实路线验证中,本文方法的轨迹与参考轨迹保持更高一致性,尤其在转弯段与局部偏差突出的区域,轨迹偏离更小、过渡更平滑。误差统计对比进一步表明,本文方法在东西向与北向误差上整体更低、更稳定,能够有效抑制异常观测导致的误差尖峰与轨迹突跳。与此同时,计算代价对比显示该性能提升是以一定的额外计算开销为代价获得的,但整体仍保持可用于在线处理的计算量级。
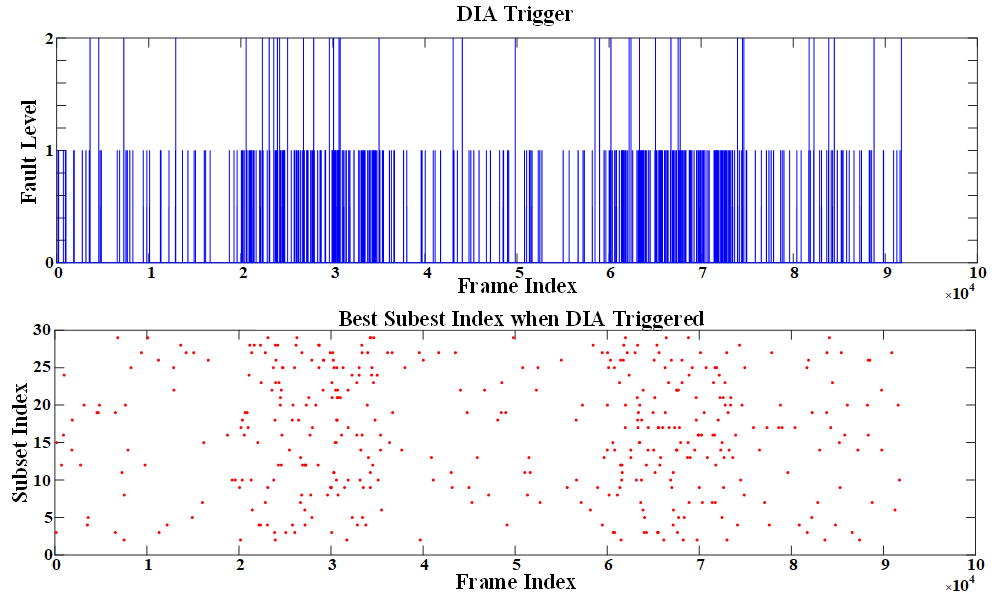
由上图可以看出触发序列显示DIA能够在观测不一致出现时及时触发并持续响应,避免异常长期“潜伏”并污染更新;最优子集索引的分布则表明算法会随时间自适应地选择不同的观测组合进行更新,而不是固定剔除某一维度或采用单一策略。这种“及时触发—动态选择—稳健更新”的机制,使系统在复杂异常场景下仍能维持稳定、连续的定位输出,体现出更强的鲁棒性与适应性。
三、实用价值
本研究的意义在于为自动驾驶车辆在GNSS退化与观测异常的复杂环境下提供了一种具有普适性的高可靠定位新范式。通过在GNSS/IMU融合框架中引入残差驱动的检测–识别–自适应机制,并采用维度级异常剔除与观测子集自适应选择,本方法突破了以往“观测噪声稳定、测量一致可信”的隐含假设,使系统能够在突跳、漂移、延迟及局部维度异常等不一致观测条件下仍保持连续、稳定且可用的定位输出。这不仅显著提升了车辆在城市峡谷、遮挡与多路径等真实道路场景中的定位鲁棒性与工程可部署性,也为面向异常观测的多传感器融合定位算法设计提供了可推广的理论基础与技术路径,对构建安全、可靠、可持续运行的自动驾驶定位底座具有重要的现实应用价值与研究前景。
论文信息:本研究由东北大学智能交通实验室完成。相关工作已被仪器与检测领域公认的国际权威期刊之-《IEEE Transactions on Instrumentation & Measurement》正式录用,即将长文发表。Ge Guo, Guangheng Liu and Jiageng Liu. GNSS Anomaly Tolerant Localization of Land Vehicles with ESKF and Residual Based Detection-Identification-Adaptation. Accepted for publication in the IEEE Transactions on Instrumentation & Measurement.



