导读:在当今的智能交通时代,自动驾驶技术正以前所未有的速度改变着人类的出行方式。从城市道路的车路协同到高速公路的智能编队驾驶,其背后都离不开一个核心问题--在无信号控制的复杂交叉口环境中,如何让无人车安全、高效地通过。据美国国家公路交通安全管理局(NHTSA)统计,2015年至2019年间约有 24.7% 的交通事故发生在交叉口,这凸显了在无信号路口开展智能决策研究的重要性。然而,现实交通环境充满不确定性。通信干扰和信号中断常常导致车辆间信息失真,导致在复杂场景下的安全性与效率难以兼顾。近日,本研究团队提出了一种创新性的“基于博弈论的风险自适应决策框架(SGA-RAD)”。该框架首次在无人驾驶车辆的决策模型中同时实现了“通信干扰感知”与“风险自适应优化”:它不仅能在存在信号中断和信息偏差的情况下自主调整决策顺序,还能根据风险水平动态分配安全权重,从而在保证安全的前提下实现更高的通行效率。该成果为未来复杂通信环境下的智能车协同决策提供了新的理论支撑与技术路径。
一、理论创新
1.通信干扰分级与风险建模机制:
本研究首次将通信干扰因素系统化建模,并将车辆根据通信状态划分为两级:受通信中断干扰(CII)的 Level-0 车辆 和受位置、速度偏差干扰(PVI)的 Level-1 车辆。这一机制打破了传统自动驾驶决策模型“通信完全可靠”的假设,使算法能够在信号丢失或数据偏差的环境下依然保持有效运行。该分层建模方法不仅为后续的风险排序和博弈决策提供了结构基础,也显著提高了系统对复杂车联网干扰的鲁棒性。
2. 基于Stackelberg博弈的风险自适应决策排序:
研究团队提出了风险驱动的分层博弈决策序列(SGA-RAD),将车辆的决策优先级与其风险水平相结合。高风险车辆(如受通信中断影响或接近冲突点的车辆)优先做出决策,低风险车辆根据博弈结果依次响应。这一机制通过Stackelberg 层级博弈结构动态优化决策顺序,使系统能在完全分布式的情况下实现全局有序的交通流。该方法有效降低了碰撞概率,解决了传统算法在不确定环境中“决策冲突”和“反应延迟”的问题。
3. 干扰感知下的动态权重与全局协同机制:
为应对实时干扰变化,论文设计了一个干扰感知的动态权重调整机制。系统根据通信质量和车辆状态动态调整安全、速度、舒适度等指标的权重,从而在不同干扰场景下实现安全与效率的平衡。同时,研究引入了全局奖励指标(Global Reward Indicator),使各车辆在局部决策时仍能兼顾整体交通效益。该机制显著提升了系统在多车强干扰环境下的协调性与稳定性,实验表明其在最复杂的“区域中断+信息偏差”情形下仍能实现低碰撞与高通行率。
二、仿真模拟
在六种典型通信干扰场景下,仿真结果表明该算法在安全性与效率之间实现了良好平衡:即使在“区域通信中断+信息偏差”的最复杂条件下,仍能保持约96%的安全通过率和稳定的通行速度,展现出极强的环境适应性与系统鲁棒性。
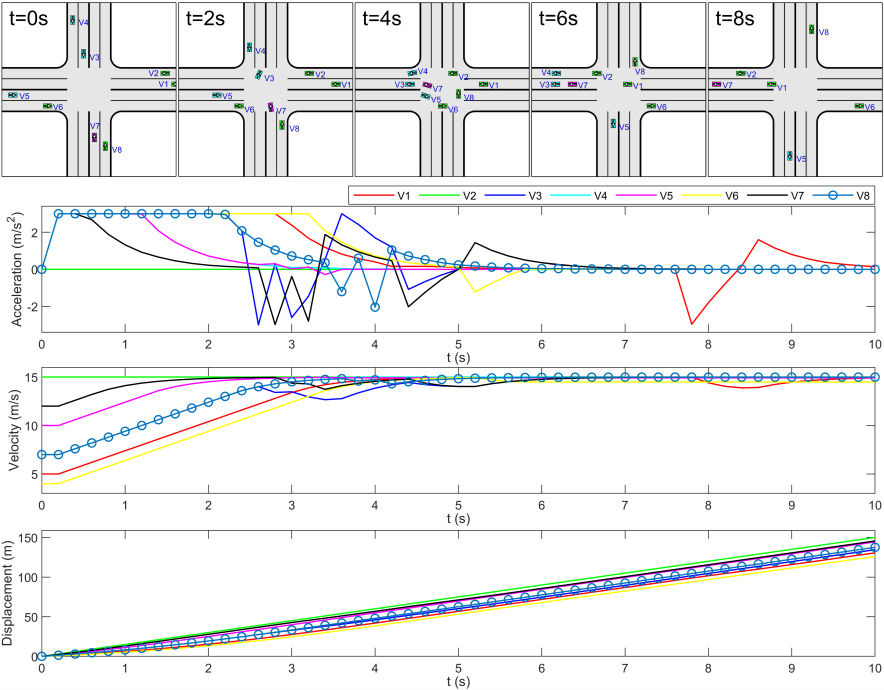
图1:在单车通信中断干扰+ 位置速度干扰下,采用SGA-RAD算法的车辆位置及加速度-速度-位移随时间变化图
从图1(单车通信中断干扰+ 位置速度干扰)可以看到,车辆依据风险优先级依次决策,通过动态调整安全距离与速度曲线,整个通行过程平稳有序,无任何碰撞发生,充分体现了算法在局部干扰条件下的自组织能力。
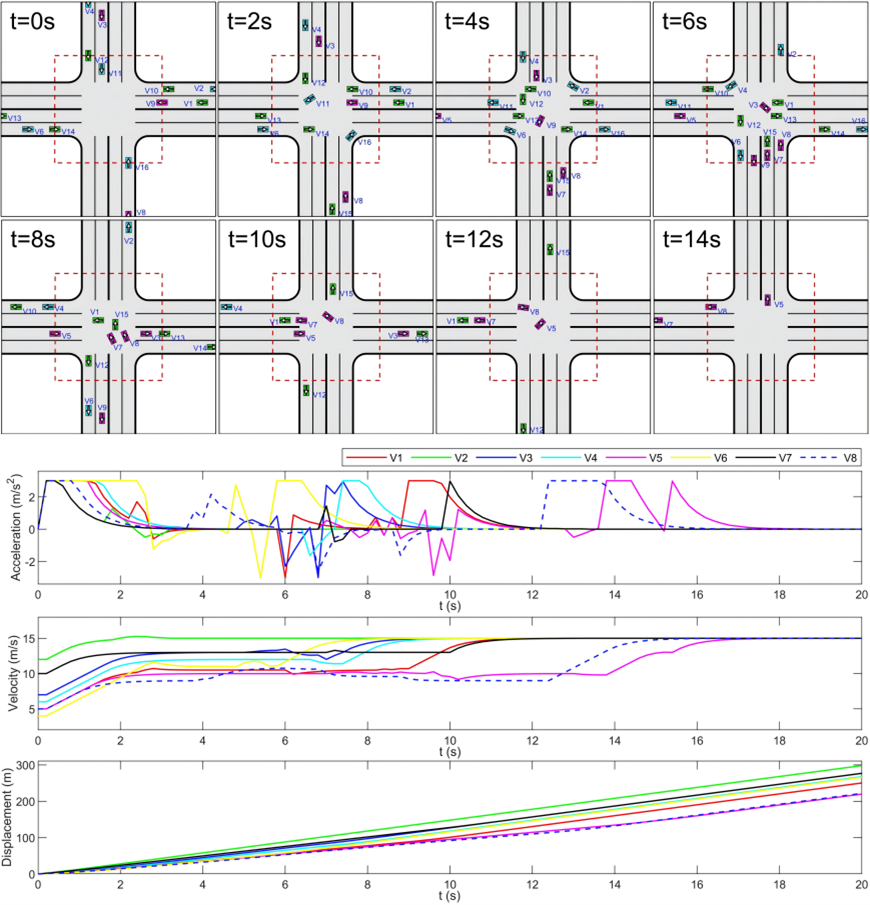
图2:在区域通信中断干扰+ 位置速度干扰下,采用SGA-RAD算法的车辆位置及加速度-速度-位移随时间变化图
而在图2(区域通信中断干扰+位置速度干扰)中,多辆车同时受干扰但依然能够凭借全局协同机制提前减速、错峰进入盲区,实现安全无碰撞的整体通过。这表明算法不仅能在单车失联情况下维持秩序,更能在群体级强干扰环境下保持系统整体稳定与高效运行。
三、研究意义
本研究的意义在于为自动驾驶车辆在通信受扰的复杂环境下提供了一种具有普适性的安全决策新范式。通过在博弈论框架中引入风险自适应机制与干扰感知建模,SGA-RAD突破了以往依赖理想通信假设的局限,使车辆能够在信息不完整、信号中断或数据偏差的情况下依然保持有序协同行为。这不仅显著提升了无人车在真实交通场景中的安全性与鲁棒性,也为车联网环境下的多智能体协同决策与智能交通系统设计提供了可推广的理论基础和算法支撑,对构建安全、高效、智能的未来交通体系具有重要的现实应用价值与研究前景。
本研究由东北大学智能交通实验室完成。相关工作已被车辆技术领域公认的国际权威期刊之一《IEEE Transactions on Vehicular Technology》正式录用,即将长文发表。
论文信息:Yakun Zhu, Yaosen Li, Zhiming Li, Zexi Li, and Ge Guo. Game-Theoretic Decision-Making for Autonomous Vehicles at Unsignalized Intersections under Communication Interferences: A Novel Risk-Adaptive Approach. Accepted for publication in the IEEE Transactions on Vehicular Technology.



