导读:在当今的智能时代,从无人机的协同编队到智能电网的实时调度,从分布式机器学习模型的训练到传感器网络的协同感知,背后都离不开一个核心计算问题——分布式优化。这意味着多个智能体(如机器人、计算节点)仅通过局部通信,协同完成一项复杂的决策任务。然而,现有许多高性能算法需要消耗巨大的算力去计算复杂的Hessian矩阵(二阶信息),且收敛速度无法保证。近日,本研究团队提出了一种创新性的Hessian-Free固定时间/预定义时间(FxT/PT)分布式(时变)优化算法框架,首次同时实现“无需计算复杂二阶信息”和“收敛时间精准预定”的目标,为资源受限的实时应用提供了理论保障与技术支撑。
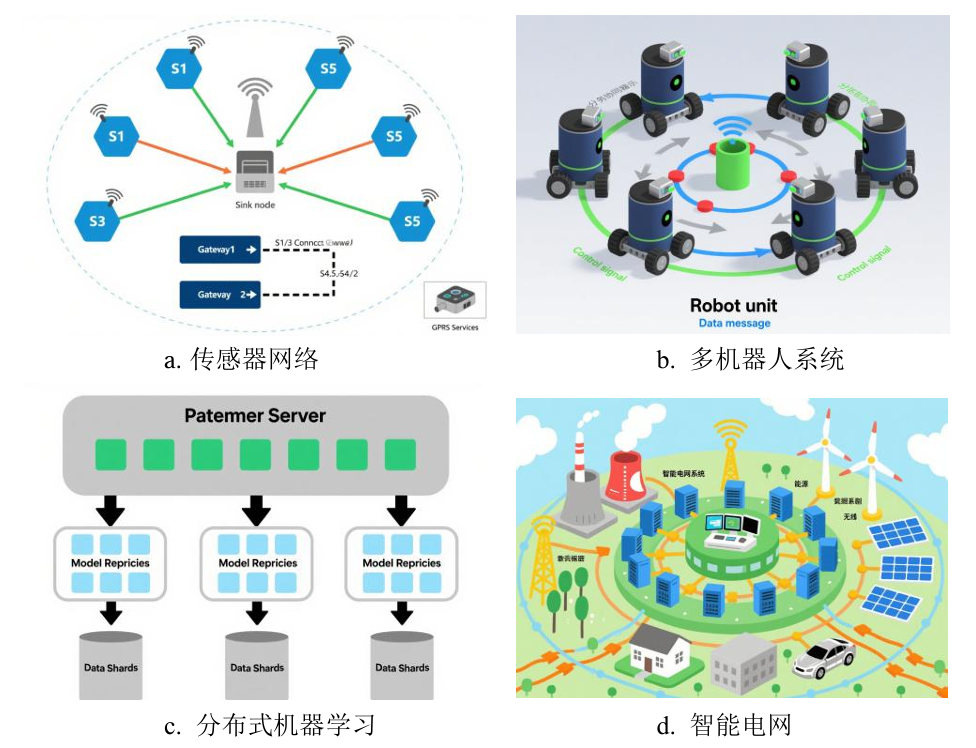
图1. 分布式优化常见应用场景图示
一、 研究背景与核心挑战
理想的分布式优化算法往往兼顾三点要求:1) 计算快(低复杂度),节省算力;2) 收敛快(有限时间),保证时效;3) 性能稳(高精度),结果可靠。但现有技术方案还未能兼顾:
传统梯度算法:通过获取一阶梯度信息实现优化目标,计算简单,但只能渐近或指数性收敛,无法预知何时能精确到达最优解。
二阶算法:虽收敛快、性能稳,但需要计算和通信Hessian矩阵(二阶信息),计算和通信开销较大,难以应用于大规模问题。
无Hessian有限时间方法:收敛较快,但收敛时间严重依赖初始状态,仍有一些不确定性;且采用的补偿系统漂移的方法使得控制信号抖动大,影响最终精度。
二、 理论创新:梯度跟踪与时变状态一致优化的协同设计
面对上述挑战,本研究突破传统二阶依赖范式,提出基于分布式梯度跟踪与状态一致收敛的双层架构:
1. 分布式梯度跟踪器(Distributed Gradient Tracker):
通过动态一致性协议,每个智能体在本地估算全局梯度均值:


其中,wi即为梯度跟踪器。
2. 固定/预定义时间控制器(Fixed-/Predefined-Time Controller):
将梯度跟踪的信息融入状态一致收敛方案中,设计控制输入:

其中针对时变优化问题采用了不一样的时变漂移补偿机制,即用范数归一化符号函数SGN(·)替代了传统符号函数sgn(·):
该方案将控制信号幅度约束于单位圆内,显著抑制输入抖振。
三、 性能优势:理论保证与仿真验证
掌握全局方向的分布式梯度跟踪器:
每个智能体并非独自优化,而是通过与其邻居的通信(传输部分信息),在本地巧妙地估算出整个系统的全局梯度方向。研究团队创新性地引入了非线性反馈设计,确保该跟踪过程可在预先设定的任意时间(如1秒、5秒)内快速、精确地完成,为整个系统提供了关键的全局视野。
稳健的一致性控制器与时变漂移补偿器:
利用跟踪器获取的全局视野信息,它负责驱动所有智能体的状态达成一致并收敛至全局最优解。针对时变环境(如追踪移动目标),团队额外创新地引入了一个范数归一化的符号函数进行补偿。它引导算法准确地朝着最优轨迹演化,并显著减弱控制输入的抖振,从而在高速收敛下依然保持了高精度优化。
技术路径和实验仿真验证结果(部分)如下图所示:
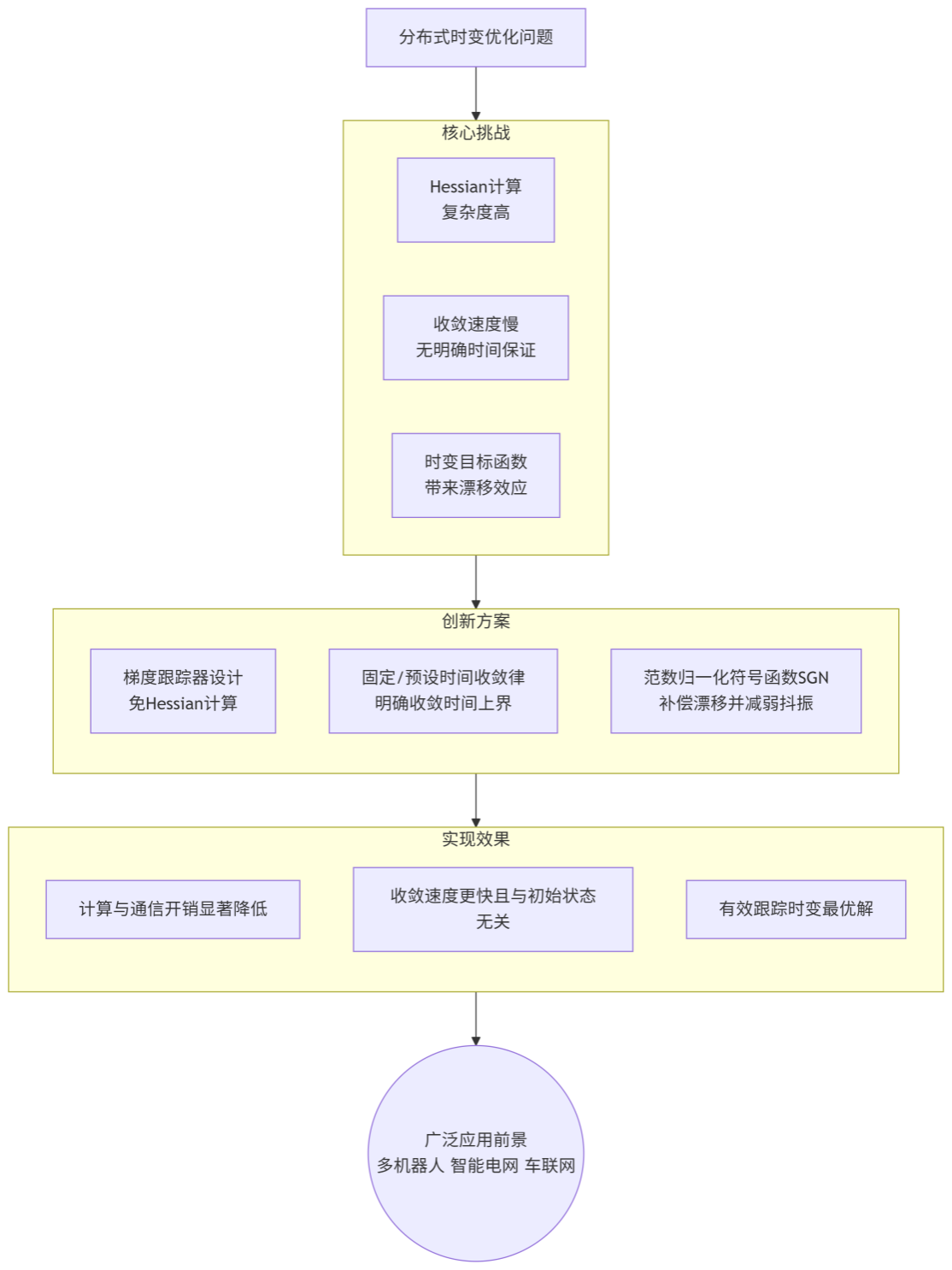
图2:技术路径示意图
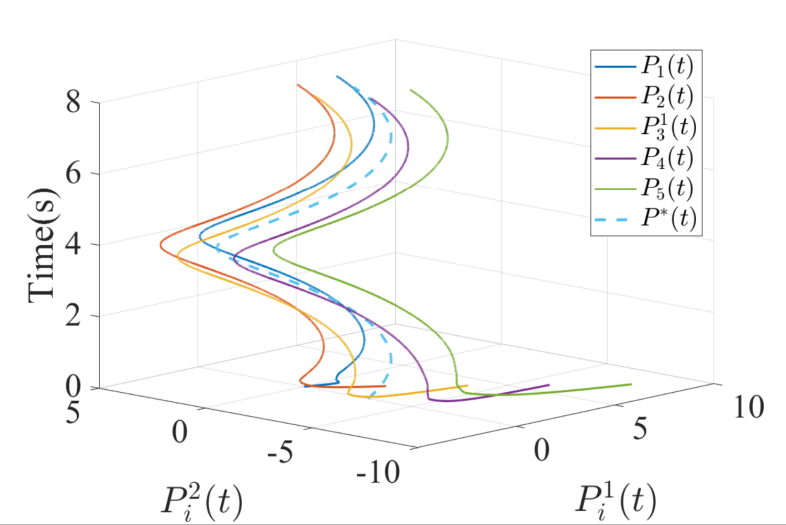
图3:多无人机协同围捕目标的状态轨迹曲线
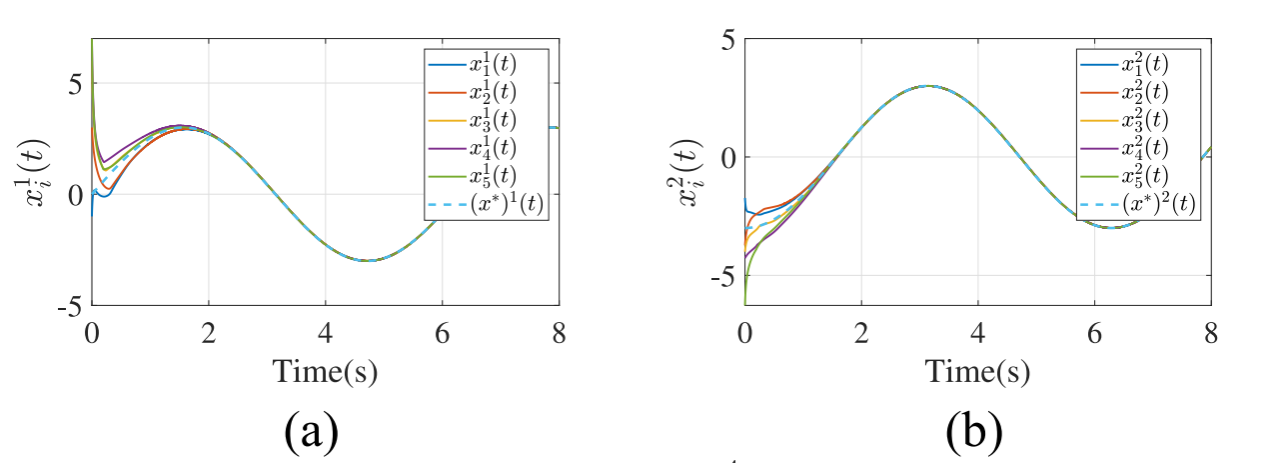
图4:无人机状态向期望轨迹收敛
四、 实用价值:为工业与应用赋能
理论创新的价值在于解决实际问题。本研究提出的全新算法框架,其核心优势在于将“不可能”变为“可能”:
u 轻量化计算,资源友好:彻底告别复杂的二阶Hessian信息,将计算和通信开销从平方级(O(n²))降至线性级(O(n)),使得算法在算力有限的嵌入式设备、边缘计算节点上也能流畅运行。
u 收敛时间可控,按需选择:收敛时间上界可独立于初始状态进行理论预估和预先设定,为系统响应提供了确定性保障。用户可以依据任务紧急程度,按实际情况设定优化参数。
u 高性能表现,精准稳定:在时变优化任务中,通过新设计的控制律,在保证快速收敛的同时,有效抑制了输入抖动,获得了更优的优化精度,使得协同控制更加平滑、稳定。
本研究由东北大学智能交通实验室完成。博士生周增弟为论文第一作者,郭戈教授为通讯作者。相关工作已发表于控制领域顶级期刊《IEEE Transactions on Systems, Man, and Cybernetics: Systems》。
论文信息:Zeng-Di Zhou, Ge Guo, et al. "Hessian-Free Fixed-/Predefined-Time Algorithms for Distributed Time-Varying Optimization". IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025. DOI: 10.1109/TSMC.2025.3593476



